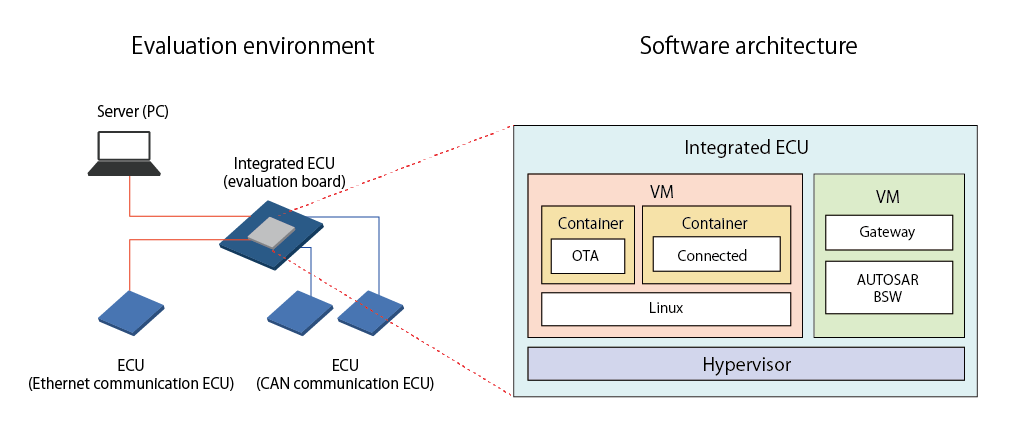
In-vehicle ECU Prototype Development
- Verify the feasibility of integration in a virtual environment toward the integration of the in-vehicle ECU
- Develop and evaluate the prototype of the integrated ECU
- Architecture design (define requirements, consider how to apply virtualization technologies, such as hypervisor and container, place functions, and so on)
- Consider and build an evaluation environment
- Software implementation (implement and configure each function in the hypervisor, container, and OS)
- Verify the feasibility (evaluate the function and performance)
- Solution of issues and evaluation (design the architecture of solutions and apply them to the implementation and evaluate them)
Remote Vehicle Emergency Stop System
- Model a self-driving vehicle system, analyze the safety, extract risks in self-driving vehicle system emergencies, and set safety goals
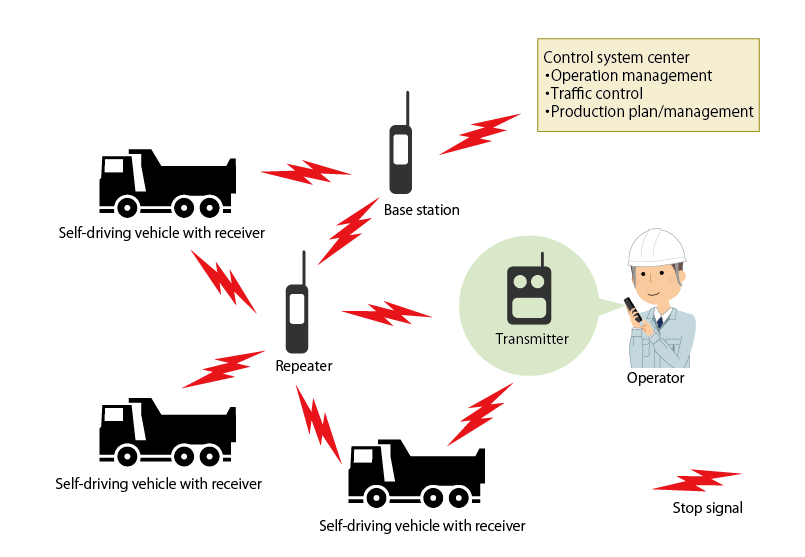
Main functions
- Self-driving vehicle stops in emergency when you issue a stop order
- Self-driving vehicle informs the control system center of an emergency stop
- Control system center’s operator issues a stop order when he predicts a collision with a pedestrian
- System component devices conduct a self-diagnosis test before the operation starts and if a failure is detected, the device reports the failure
- System component devices keep record of operation logs to enable an analysis of problems